Centre for Autonomous Systems
KTH Stockholm, Schweden
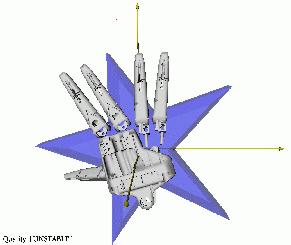
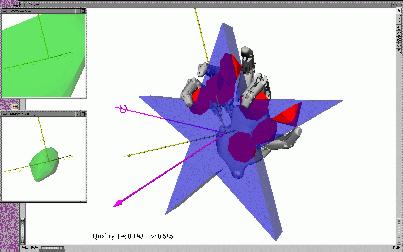
In addition to its visualization capabilities, the simulator has facilities for modeling a complete robotic work cell, which is necessary when planning an actual grasping task. When combined with a real-time, model-based vision system to align the pose of a simulated object with the pose of an actual object in the workspace, the simulator can be used to plan, execute, and monitor a complete grasping task. Exam-ples of this process are presented and serve to demonstrate this application of the simulator.
Recently, a multi-rigid body dynamics system has been implemented which further increases the realism of the simulation. With it, a user can examine the grasp formation process to ensure that a desired grasp can be achieved. In addition, it allows more complex hand control algorithms to be tested. Finally, future work involving tactile sensor simulation and automatic grasp selection will also be discussed.
 Zur Startseite
Zur Startseite
|
Erstellt von: Anke Weinberger (2002-02-04). Wartung durch: Anke Weinberger (2002-02-04). |